

November 2015
The main event for the team in November was a scrimmage match hosted by St. Mary-St. Vincent high school (Lebron James' alma mater). November also saw the first appearance of the mechanism that would ultimately become the top half of Centaur. We developed a launcher and harvester mechanism. Also in November, Max Borsch joined the team and began to work on the Autonomous Mode program for PushBot.
 David watches the team practice with a robot while Max beghins programming PushBot. |  Ben and Mike try to mount the Launcher to the tank tread design. |  The boys relax in the room. |
|---|---|---|
 Max carefully aligns PushBot to test his autonomous program. |  Tiree's first version of a rotating arm. |  PushBot in starting position. |
 A close up look of Tiree's arm. |
Early on a Saturday morning, seven team members headed down to Akron for a robot scrimmage. The event was hosted by St. Mary-St. Vincent high school (Lebron James' alma mater). Four other teams were there as well. We were very pleased by our performance at the scrimmage. We were the only team with a working autonmous mode, and we finished in first or second place in every match. Tiree and Troy also made great progress on the rotating arm design that eventually became the top half of PushBot. And we saw a lot of new ideas being developed on the other teams' robots.
 The day began early with donuts. |  The boys piled into the van... |  The team gets their robots ready to scrimmage. |
|---|---|---|
 Other teams brough a PushBot design as well. |  Daniel relaxes at the scrimmage. |  Another team brought a tank tread design. |
 Troy having fun at the scrimmage. | 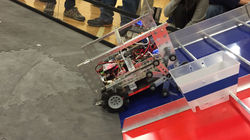 An innovative wheel design at the scrimmage. |  Dylan and Max practice driving PushBot. |
 Mike uses a specialized tool to create a chain for the launcher mechanism. |  Troy and Mr. Brodie at the scrimmage. |  Tiree Walker at the scrimmage. |
 Arjun works on the Launcher |  Troy and Tiree work on the rotating arm |  Our PushBot is ready for action! |
 A close-up look at the improved rotating arm design. |  Some robots fared better than others. |  After the scrimmage, Max and Tiree relax with a few rounds of ping-pong. |
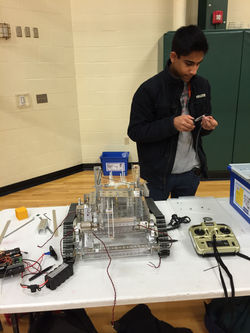
One of our most promising deisgns for a scoring mechanism involved using surgical tubing to "harvest" scoring cubes from the field and a "launcher" to place them in the baskets. We pursued this idea for some time but ultimately abandoned it for two reasons: our harvester was never quite reliable enough and we learned some of the competition rules prohibited our launcher.
 Mike works on the harvester. |  The completed Launcher mechanism. |  Reed Chen standing next to an alternative delivery mechanism he developed. |
|---|---|---|
 Harvester with delivery ramps on the sides. |  Maheep studies the new robot design. |  The new treads arrive! |
 The new tank treads might provide more traction? |