
October 2015
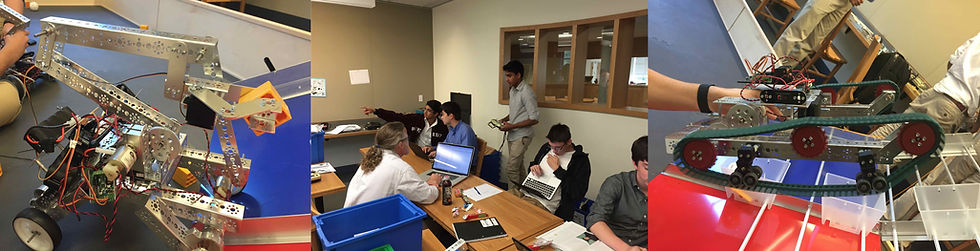
Although our team continued to experiment with new robot designs, our initial efforts in October focused on improving the PushBot robot we had built. Dylan began writing an autonomous mode program, and other team members built improvments for the arm mechanism, including a cage-like device that proved to be quite successful at picking up objects.
 Isaac and Zach discuss ways to improve the gripping claws while Troy and Sharan work in the background |  Mike adjusts the gears on the arm while Dylan and Daniel look on |  Dylan programs the configuration file on PushBot |
|---|---|---|
 Mike tries tape to improve the gripping arm |  Isaac works on the cage design for the retrieval arm |  The completed cage design |
 Isaac and Zach adjust the gripper arm while Daniel looks on |  PushBot with its electronics |  Dylan begins programming autonomous mode |
One of our early ideas to climb up the ramp was to "walk" up it. Jack MacIntosh began developing a four-legged robot called "Cheetah"; Reed Chen and his team also began working on a walker design. Both ideas were ultimately abandoned, but were a lot of fun to build.
 David adjusts Reed's Walker |  Jack MacIntosh's completed Cheetah robot |  Jack about to test drive his Cheetah robot |
|---|---|---|
 Reed, John and Zach make improvements to the Walker design |
A lot of our time in October was spent experimenting with different designs. The team also hosted another successful Open House event for prospective students interested in US. Arjun streamlined his initial chassis and added an articulating arm. Reed started working on a launching device. Troy and Sharan began building a low, wide platform to mount scoring mechanisms on. Tiree Walker built a small, highly mobile platform that could instantaneously change direction at a 90 degree angle.
 Reed working on his Launcher design. |  The team discusses Reed's Launcher. |  Troy hard at work during the Open House event. |
|---|---|---|
 Sharan and Troy work on their new platform idea. |  Arjun, Dylan and Troy work on a new chassis. |  Ben Williams works on a robot design. |
 Arjun and Tiree at the Open House event. |  Arjun working. |  Arjun's arm with a scoring cube. |
 Reed working on Harvester |  Tiree's Omnidirectional platform |  Arjun's new arm fully extended |
Early on in our design process, Mike Letterio pursued the idea of using tank treads to climb the ramp. He researched potential designs online and experimented with three different kits. Ultimately, Mike's efforts paid off and his design became the bottom half of our competition robot, Centaur.
 Early treads were from the VEX kit. |  Mike and Troy evaluate the climbing potential of the VEX treads. |  Side view of the VEX treads on the ramp. |
|---|---|---|
 Troy demonstrates a potential scoring arm for the robot. |  Ben and Mike work on the electronics for the tank. |  The fully assembled tank. The new Tetrix treads provided more traction. |
 What could Mike be working on over there? |  Mike holds the beginnings of "Harvester", a potential gathering and scoring device. |